Ego-vehicle Cruise Mode
How to use the Cruise Mode feature
Cruise Mode connects the ego-vehicle to MORAI SIM’s internal NPC driver algorithms, enabling autonomous navigation around the map for users without a separate Autonomous Driving Software Stack.
Access Cruise Mode through the Vehicle Info window by clicking on the ego-vehicle. This button should be located at the top of the Vehicle Info panel
Once enabled, the ego-vehicle follows MGeo links towards a target location on the map. To visualize the links the vehicle is traversing along, refer to the MGeo Viewer manual.

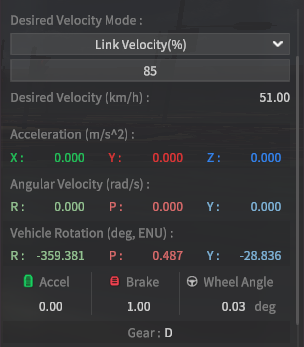
Vehicle Telemetry
Desired Velocity Mode: Used to set the target speed of the selected NPC vehicle.
Link Velocity (%): The desired velocity is given in advance to the pass link that the vehicle follows, and actual desired velocity is determined by the percentage multiplied by this desired velocity.
Constant Velocity (km/h): Set by default to 60, is modifiable by the user.
Desired Velocity (km/h): The longitudinal target speed that the vehicle is currently following.
Control Mode: Indicates whether the current vehicle is in Cruise Mode or Keyboard mode.
Current Velocity (km/h): The longitudinal speed of the current vehicle.
Acceleration (m/s2): Displays the linear acceleration w.r.t. the vehicle coordinate system.
Angular Velocity (deg/s): Displays the angular velocity of the vehicle.
Vehicle Rotation (deg, ENU): Displays the rotating pose of the vehicle based on the NorthEastern phase coordinate system.
Accel: Accelerator command value. (Min: 0, Max: 1)
Brake: Brake command value. (Min: 0, Max: 1)
Wheel Angle (deg): Indicate the steering angle of the vehicle.
Gear: Displays the current gear status of the vehicle.
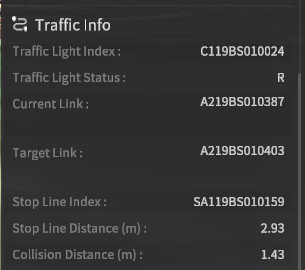
Traffic Info
Traffic Light Index: Indicates the index of the next traffic light the vehicle will encounter.
Traffic Light Status:
R: Red - Stop
SG: Green - Straight
G_with_GLeft: Green - Straight, but with a left turn available
Current Link: Indicates the index of the MGeo link that the current vehicle is following.
Target Link: Indicates the index of the MGeo link that is currently targeted by the vehicle.
Stop Line Index: Indicates the index of the stop line that the current vehicle is facing.
Stop Line Distance (m): Indicates the relative distance to the next stop line the vehicle will encounter.
Collision Distance (m): If an object is detected in front of the vehicle (either stationary or another vehicle), the distance to collision.