How to use Sensor Noise generation feature
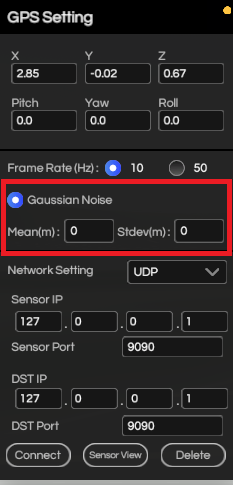
GPS Noise
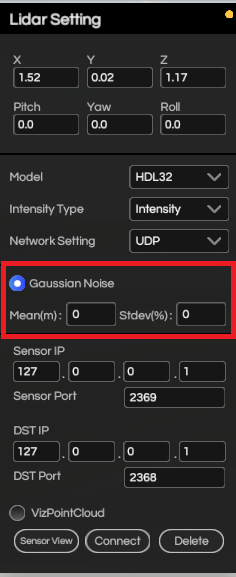
Lidar Noise
IMU Noise Filter
IMU can apply Bias-instability, Random Walk(Rate Random Walk), White Noise(Velocity(Angle) Random Walk).
Each Noise could be on/off by selecting or deselecting the checkbox on the left side of each noise model.
The parameters and units of each noise are as followings and are set based on the characteristics of IMU used.
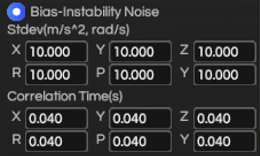
Bias-instability Noise
Bias-instability Standard deviation(sigma)
- Acceleration : m/s^2
- Gyroscope - rad/s
Correlation Time (s)
Random Walk Noise (Rate Random Walk)
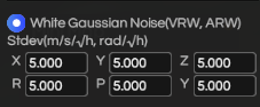
White Noise (Velocity(Angle) Random Walk)